Управление биполярным шаговым двигателем

Шаговый двигатель
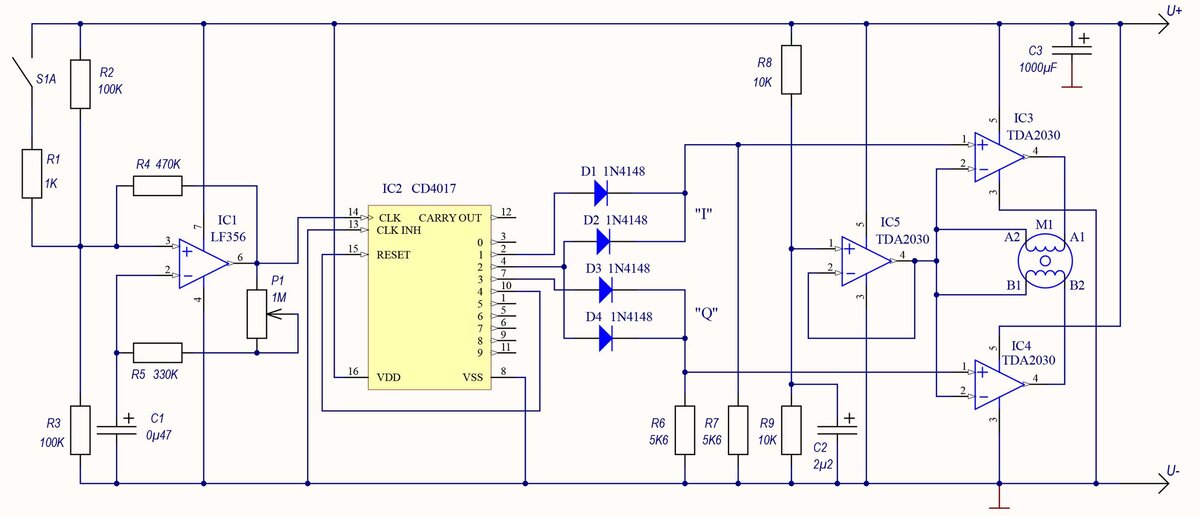
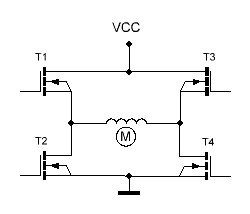
Как-то раз мне захотелось поэксперементировать с шаговыми двигателями. А вот с биполярным двигателем всё гораздо сложнее. Он имеет минимум две обмотки, на каждом конце которых полярность питания должна меняться на противоположную. Кто-то скажет "зачем изобретать велосипед? Купи драйвер на L и радуйся жизни", может быть это и правильно, но мы же не ищем лёгких путей, да и что-нибудь спаять руки чешутся а драйверы были куплены, просто они ещё ехали из Китая. Немного покопавшись в интернете, я заинтересовался такой штукой, как H-мост.









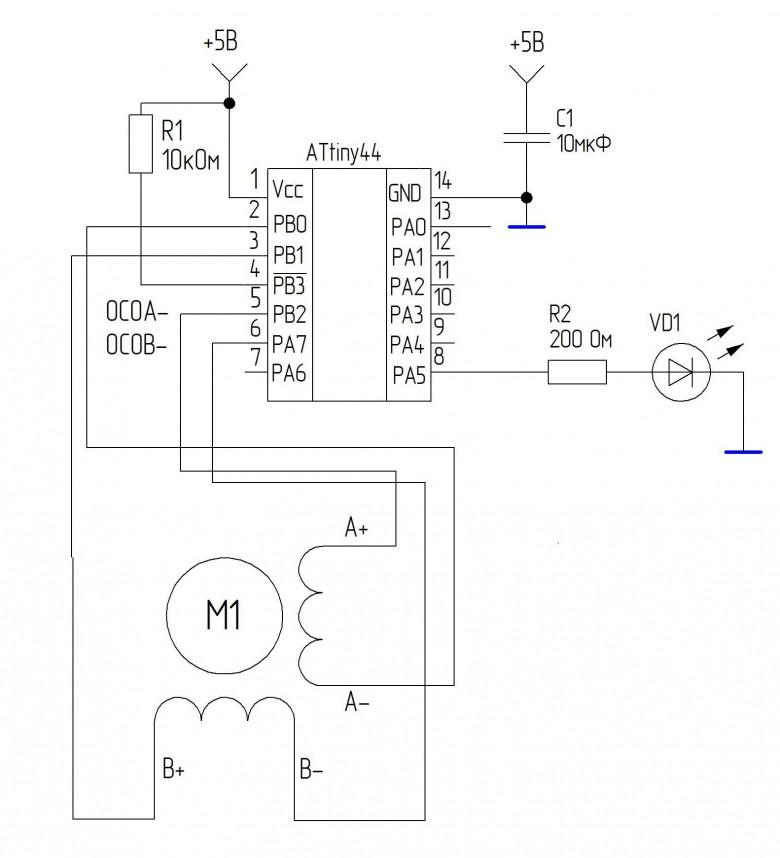
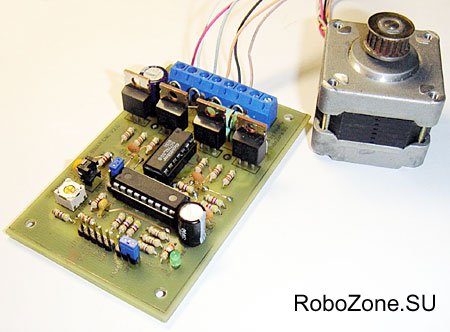
Плата Arduino Nano, инкрементальный инкрементный энкодер EC11, драйвер для шагового двигателя DRV, макетная плата, соединительные провода, и биполярный шаговый двигатель Mitsumi. После загрузки скетча для теста контактов энкодера, можно подключать энкодер к плате Arduino Nano, как показано на этой схеме. Этот вариант кода, не отключает драйвер шагового двигателя, то есть после завершения вращения продолжается подача питания на шаговый двигатель, таким образом происходит потребление энергии, но зато таким образом, вал шагового двигателя жестко удерживается.


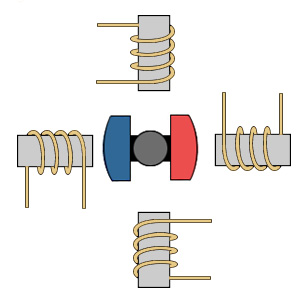
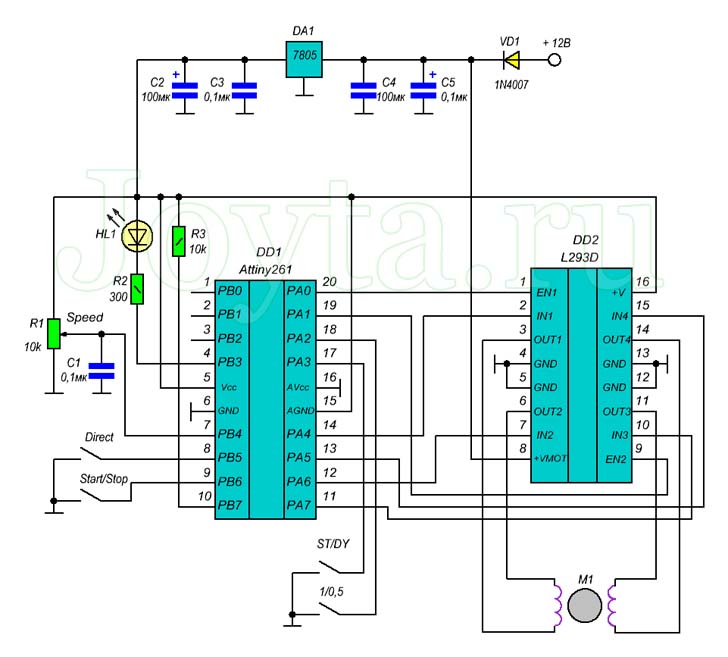

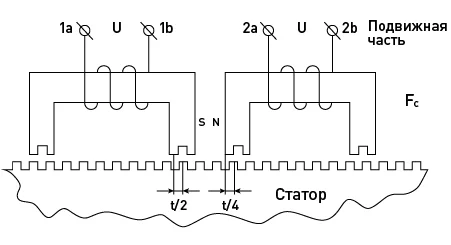

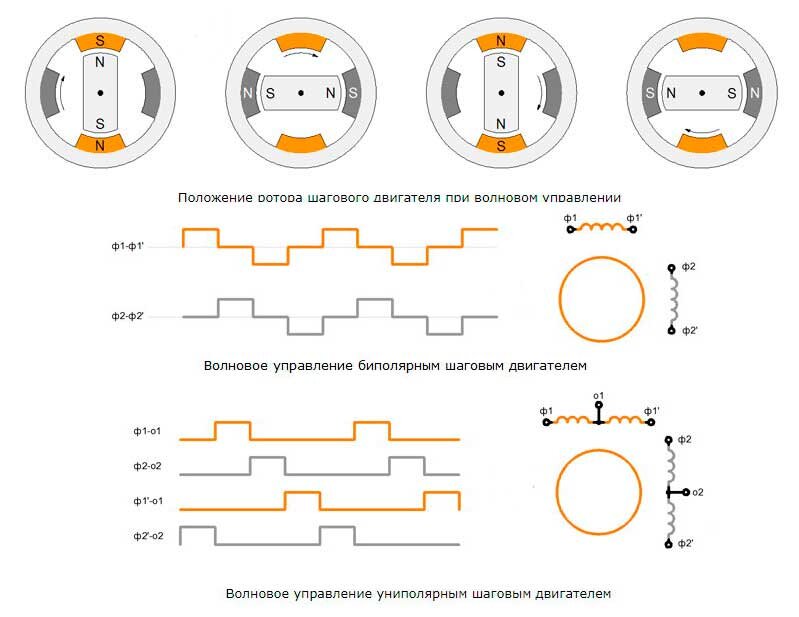
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода рис. Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки.